Simulator Performance and Sensitivity Report
This chapter reports how the RMS-NAV navigation pipeline performs on simulated images: how accurately each technique recovers a known transform, and how its navigation responds as a single scene parameter is swept. It is a standalone chapter, separate from the user and developer guides, and is regenerable on demand from the simulator scene catalog and sweep harness.
The numbers below are representative measurements from the committed scene catalog and sweeps. The technique solvers carry sub-millipixel floating-point jitter across processes and machines, so treat the recovery errors as “comfortably within the stated bound” rather than exact constants; the qualitative results (which technique is load-bearing, where navigation fails, how error trends with phase) are stable.
Purpose and scope
This report summarises two measurements taken on simulated frames with ground truth that is correct by construction:
Algorithmic-invariant recovery – a planted offset (or camera roll) the navigator must recover, for each technique in the ladder.
Single-variable sensitivity – a base scene driven across noise, phase, and body size, showing the navigability cliff, the phase response, and the technique-selection transitions.
The report keys on the recovered geometry (offset error, roll error, primary technique, success/fail). The per-technique confidence coefficients are uncalibrated on these clean frames, so the absolute confidence value is reported but not interpreted as a calibrated tier.
Methodology
A sweep drives one base scene by overriding a single parameter across a list
of values and navigating each step. For an offset or camera-roll sweep the
planted ground truth is read from the (overridden) parameter itself, so the error
is recovered - planted. A sweep optionally pins one technique
(only_techniques=<name>) and reads that technique’s own recovered offset, so
each technique is characterised independently. The harness, spec schema, runner,
and plotting live in tests/integration/sim_sweep.py, sim_sweep_runner.py,
and sim_sweep_plots.py.
Offset value sets. Two offset sweeps per technique probe the offset axis at two scales:
A dense sub-pixel sweep plants every offset in
0.0, 0.05, 0.1, 0.137, 0.2, 0.25, 0.31, 0.382, 0.45, 0.5, 0.55, 0.611, 0.667, 0.7, 0.75, 0.823, 0.9, 0.95, 1.0, 1.25, 1.5, 1.618, 1.75 (px)
– the quarter- and half-pixel anchors, the thirds, golden-ratio fractions, and a spread of other non-power-of-2 fractions, sampling the pixel densely enough to expose any fraction-dependent residual.
A wide-range sweep plants offsets across the full navigable range with varied fractional parts, up to each technique’s ceiling.
Navigable range. The recoverable offset is bounded by the extended-FOV search
margin. It is size-keyed per instrument: Cassini NAC is [13, 25] px at 256,
[25, 50] at 512, and [50, 140] at the full 1024. The sweeps run at 220 px
(margin ~50 px, the generic fallback) for tractable runtime – a 1024 px
navigation costs ~35 s – and sweep to the measured per-technique ceiling:
Technique |
Base scene (pinned technique) |
Wide ceiling |
Limit set by |
|---|---|---|---|
BodyDiscCorrelateNav |
|
~48 px |
extfov margin |
RingEdgeNav |
|
~48 px |
extfov margin |
BodyLimbNav |
|
~40 px |
extfov margin |
StarFieldFromCatalogNav |
|
~20 px |
frame size / per-star search window |
BodyBlobNav |
|
~extfov margin |
lit-shape (disc / crescent) coarse acquisition |
Beyond a technique’s ceiling the navigator correctly reports failure (the feature is outside the searchable region); the wide sweeps run to the ceiling and, for the blob, a little past it to show the degradation.
BodyBlobNav previously stopped at ~6 px (the predicted bounding box plus its
per-body slop), past which the brightness-weighted centroid clipped and silently
biased. A coarse lit-shape correlation now re-centres each blob’s box on the body
across the full search window before the centroid is taken, so the capture range
matches the other techniques (recovery holds to a few hundredths of a pixel out to the
extfov margin on the low-phase small_sphere_base sweep). The template tracks phase:
a filled disc at or below half phase, and a synthesised crescent above it, oriented
along the sub-solar direction the blob feature carries. A high-phase crescent displaced
~20 px beyond its bounding box recovers to a few hundredths of a pixel on the
planted_offset_blob_crescent_displaced invariant scene. See
Body Blob Centroid (BodyBlobNav).
Running the sweeps
The sweeps are not part of the normal pytest run. Generate every sweep’s
response curve (JSON under tests/integration/sim_sweeps/results/) and the
figures in this chapter with:
python -m tests.integration.sim_sweep_runner
A single sweep can be inspected from Python via
tests.integration.sim_sweep.load_sweep / run_sweep. The planted-recovery
table below comes from the algorithmic-invariant scenes, which do run in the
deliberate (integration-marked) tier:
pytest tests/integration/test_sim_algorithmic_invariants.py -m "" -n auto --dist=loadfile
Targeted regression scenes under sim_scenes/regression/ guard specific
behaviours in the normal suite without running the full sweep.
See The Image Simulator for the scene catalog, scene formats, and the sweep / image-dump tooling, Testing for the test tiers, and Navigation Models for the simulated models that emit the features each technique consumes.
Example scenes
The frames below are the actual catalog scenes behind the measurements in this
chapter, rendered from their YAML by
python -m tests.integration.sim_doc_images.
Resolved disc
Irregular mesh body
Mesh limb

High-phase crescent

Mesh crescent
Ring edge

Star field
Sweep base sphere
Algorithmic-invariant recovery
Each scene below plants a known transform and the navigator predicts the unshifted geometry, so the recovered offset (or roll) should equal the planted value. The planted offsets are deliberately off-grid (no integer, half-, or quarter-pixel values), so a technique cannot land on a sub-pixel-bias null and report a flatteringly small error; these are single-sample correctness checks at one arbitrary phase, while per-technique sub-pixel precision across many offsets is characterized in the offset-accuracy section below. The technique column names the load-bearing technique – pinned for the scenes whose fused confidence sits below the success threshold on a clean frame (blob, limb, ring, roll), and the full ensemble for the disc and star scenes.
Scene |
Technique |
Planted |
Recovered |
Error |
|---|---|---|---|---|
|
BodyDiscCorrelateNav |
(1.43, -0.61) px |
(1.50, -0.60) px |
0.07 px |
|
BodyDiscCorrelateNav (mesh) |
(1.43, -0.61) px |
(1.43, -0.62) px |
0.01 px |
|
BodyBlobNav |
(1.43, -0.61) px |
(1.42, -0.62) px |
0.02 px |
|
BodyBlobNav (120 deg) |
(1.43, -0.61) px |
(1.24, -0.59) px |
0.19 px |
|
StarField + UniqueMatch + Refine |
(1.43, -0.61) px |
(1.32, -0.65) px |
0.12 px |
|
BodyLimbNav |
(1.43, -0.61) px |
(1.40, -0.66) px |
0.06 px |
|
RingEdgeNav |
(1.43, -0.61) px |
(1.42, -0.62) px |
0.01 px |
|
StarFieldFromCatalogNav (roll) |
(1.43, -0.61) px, 1.37 deg |
1.356 deg |
0.01 deg |
Observations:
All scenes plant the same off-grid offset
(1.43, -0.61)px, so the per-technique errors are at one common sub-pixel phase and directly comparable. Every technique recovers well within the 1.0 px (and third-of-a-degree) bound.At this phase the mesh disc and ring edge recover to ~0.01 px, the blob to ~0.02 px, the limb to ~0.06 px, and the disc to ~0.07 px; the fused star field to ~0.12 px.
The high-phase blob crescent (~0.19 px at 120 deg) is the hardest case: only a thin lit crescent constrains the centroid. It still recovers sub-pixel.
These are single-phase samples, so a given technique can sit above or below its multi-offset median in the offset-accuracy section (e.g. the disc’s ~0.07 px here versus its ~0.006 px sweep median); the table is a same-phase comparison and a correctness check, not the precision benchmark.
Single-variable sensitivity
The noise, phase, and range sweeps drive one base scene – a well-resolved sphere
with a planted (1.5, -0.5) offset – so the offset error column is the
recovery error at each step. (The offset and roll sweeps that follow use their
own base scenes.)
Read-noise sweep
Varying noise.read_noise_dn from a clean frame to past the navigability
cliff:
|
Status |
Offset error |
Confidence |
Primary technique |
|---|---|---|---|---|
1 |
success |
0.00 px |
0.39 |
BodyDiscCorrelateNav |
4 |
success |
0.00 px |
0.39 |
BodyDiscCorrelateNav |
8 |
success |
0.00 px |
0.39 |
BodyDiscCorrelateNav |
16 |
success |
0.00 px |
0.39 |
BodyDiscCorrelateNav |
32 |
success |
0.00 px |
0.39 |
BodyDiscCorrelateNav |
64 |
failed |
– |
0.00 |
– |
The disc correlation is robust: the offset is recovered exactly until the read noise overwhelms the body signal, at which point the frame is classified unnavigable and navigation fails cleanly. The confidence is flat across the navigable range on these uncalibrated clean frames.
Phase-angle sweep
Varying bodies.0.phase_angle across the full range on the resolved sphere:
Phase (deg) |
Status |
Offset error |
Confidence |
Primary technique |
|---|---|---|---|---|
0 |
success |
0.00 px |
0.40 |
BodyBlobNav |
30 |
success |
0.00 px |
0.39 |
BodyDiscCorrelateNav |
60 |
success |
0.01 px |
0.39 |
BodyDiscCorrelateNav |
90 |
success |
0.00 px |
0.39 |
BodyDiscCorrelateNav |
120 |
success |
0.00 px |
0.39 |
BodyDiscCorrelateNav |
150 |
success |
0.00 px |
0.30 |
BodyDiscCorrelateNav |
The resolved body navigates to success at every phase and recovers the planted offset to within ~0.01 px throughout. The disc correlation holds its accuracy as the terminator sweeps across the lit disc – the gradient-domain matched filter keys on the sunward limb, which stays a sharp, well-defined feature at every phase – so there is no mid-phase accuracy penalty. At zero phase the blob’s lit-weighted centroid wins the technique selection outright: a fully-lit disc has no correlation-gradient advantage for the disc to exploit. From 30 deg onward the disc carries the frame.
Body-size (range) sweep
Shrinking bodies.0.axis{1,2,3} together from well-resolved to unnavigable.
This is the technique ladder the range regime is meant to exercise:
Diameter (px) |
Status |
Offset error |
Confidence |
Primary technique |
|---|---|---|---|---|
130 |
success |
0.00 px |
0.39 |
BodyLimbNav |
90 |
success |
0.00 px |
0.39 |
BodyDiscCorrelateNav |
60 |
success |
0.01 px |
0.39 |
BodyDiscCorrelateNav |
40 |
success |
0.00 px |
0.39 |
BodyDiscCorrelateNav |
20 |
success |
0.00 px |
0.40 |
BodyBlobNav |
12 |
failed |
– |
0.00 |
– |
The primary technique transitions cleanly as resolution falls: a well-resolved body (130 px) is navigated by the limb fit; a mid-size body by the disc correlation; a small body (20 px) falls to the orientation-free blob centroid; and the smallest body (12 px) is unnavigable. Every navigable step recovers the planted offset exactly. This transition is the sim’s most direct verification that the orchestrator selects the right technique for the available resolution.
Offset accuracy by technique
The invariant scenes above plant a single offset near the middle of a pixel. To look for pixel-boundary, quantization, and range corner cases, each technique is swept across the dense sub-pixel set and the wide range described under Methodology. The dense sweep traces accuracy across the pixel:
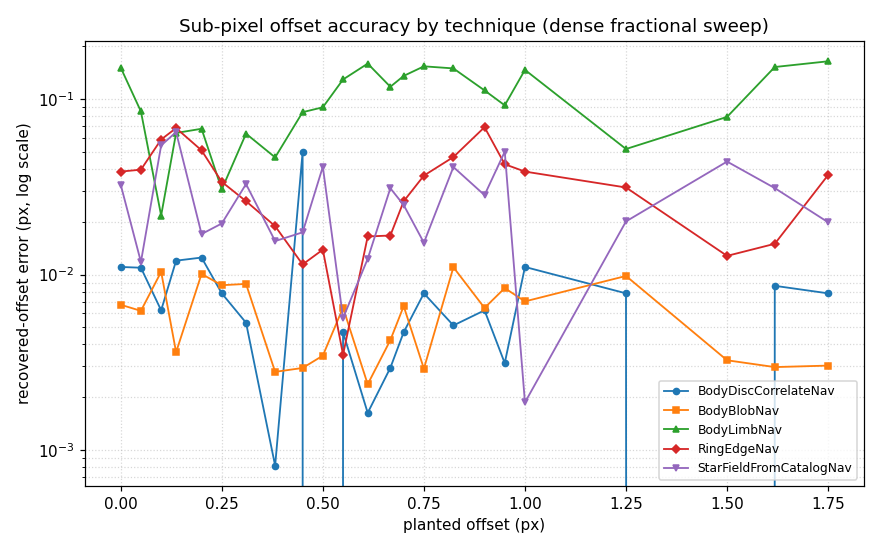
Recovered-offset error (log scale) vs planted sub-pixel offset, each technique pinned. The disc, blob, and star field sit at or below a few hundredths of a pixel; the ring edge (~0.03 px) and the limb (~0.09 px) hold distance-transform residuals.
Technique |
min |
median |
max |
|---|---|---|---|
BodyDiscCorrelateNav |
0.000 |
0.006 |
0.050 |
BodyLimbNav |
0.022 |
0.092 |
0.165 |
RingEdgeNav |
0.003 |
0.034 |
0.069 |
BodyBlobNav |
0.002 |
0.006 |
0.011 |
StarFieldFromCatalogNav (dim field) |
0.002 |
0.025 |
0.065 |
StarFieldFromCatalogNav (bright field) |
0.001 |
0.005 |
0.012 |
The correlation and centroid techniques sit at or below a few hundredths of a pixel; the distance-transform techniques carry a larger sub-pixel residual:
Disc and blob recover to <0.01 px (median 0.006), and the bright star field to ~0.005 px – the most accurate. A zero shift between identical frames recovers the disc exactly at
(0, 0).The ring edge holds a ~0.03 px residual and the limb a ~0.09 px residual across the dense sweep, both distance-transform effects that vary with the sub-pixel phase; they stay well inside the invariant bound. See Body Limb Fit (BodyLimbNav) for the mechanism.
The star field is pinned here, so its sub-pixel rows below ~1 px are absent: the field matcher alone does not recover a sub-pixel translation of the whole field (the two-star path in the full ensemble does – see the planted-offset star invariant). Above ~1 px the dim field recovers to a median ~0.025 px and the bright field to ~0.005 px. The dim/bright split is detailed below; the per-star centroiding mechanism is in Star Field Pattern Match (StarFieldFromCatalogNav).
The wide-range sweep confirms each technique recovers across the navigable range:
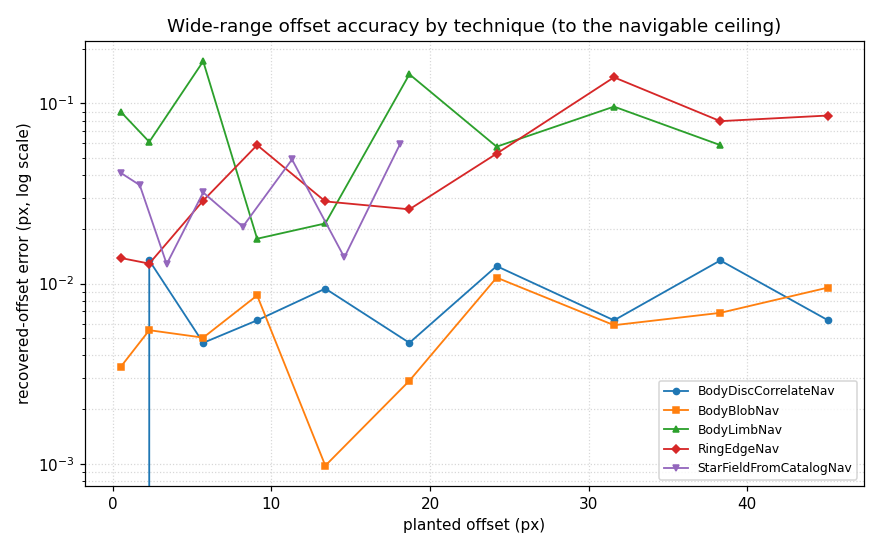
Recovered-offset error vs planted offset across the navigable range. Disc, ring, limb, blob, and star each recover to their ceilings; the blob now tracks the body across the full window via its coarse acquisition.
The disc, ring, limb, and star recover with the same accuracy out to their ceilings (~48, ~48, ~40, ~20 px). The blob now holds across the navigable range too: for the 20 px body it stays under ~0.01 px out to ~45 px, where it was previously a ~6 px small-offset technique (degrading to ~5.8 px at 20 px) – the blob-shaped-disc coarse acquisition re-centres the integration window on the body before the centroid, so the body no longer clips out of the predicted bbox. The disc template models only a near-full disc, so this holds for bodies at least half-lit; a high-phase crescent beyond its bbox still needs a prior. See Body Blob Centroid (BodyBlobNav).
Star-field centroiding: dim vs bright
Two sweeps measure the star field on the same six-star geometry and planted
offset, varying only the stars’ brightness: star_offset_fine plants a dim
field (vmag 3-4, ~100-150 DN net peak) and star_offset_fine_bright a bright
field (vmag 0-0.8, ~1000-2000 DN net peak, below the 4095 DN full well).
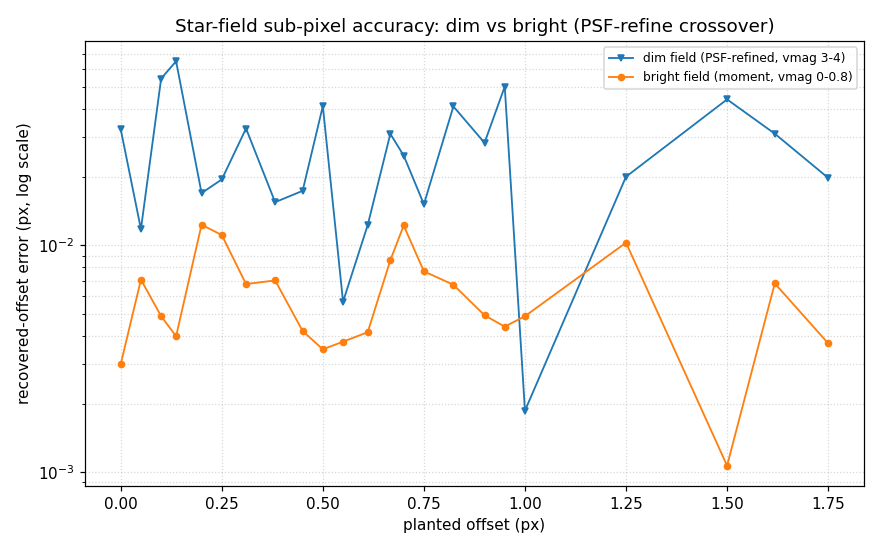
Recovered-offset error (log scale) vs planted offset for the dim and bright star fields. The dim field sits near ~0.02 px; the bright field reaches ~0.005 px – below every other technique.
The dim field recovers to a median ~0.025 px and the bright field to ~0.005 px, the most accurate of any technique. The centroiding mechanism behind this split is documented in Star Field Pattern Match (StarFieldFromCatalogNav).
A finer characterization sweeps a uniform-brightness field across a 20x
integrated-SNR range and overlays three centroiding modes – moment-only,
PSF-everywhere, and the shipped SNR-adaptive choice – under three backgrounds:
clean, elevated read noise, and a stray-light gradient. (Run by
python -m tests.integration.star_snr_characterization; not part of pytest.)
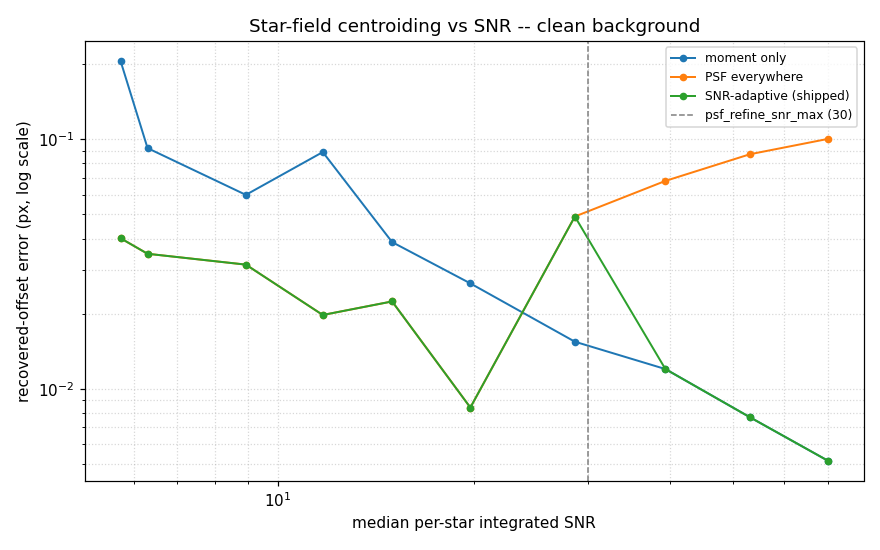
Clean background. The moment (blue) improves as the field brightens; the PSF fit (orange) wins at low SNR but plateaus at ~0.05-0.07 px. The shipped adaptive choice (green) rides the lower envelope of the two, crossing near an integrated SNR of ~30.
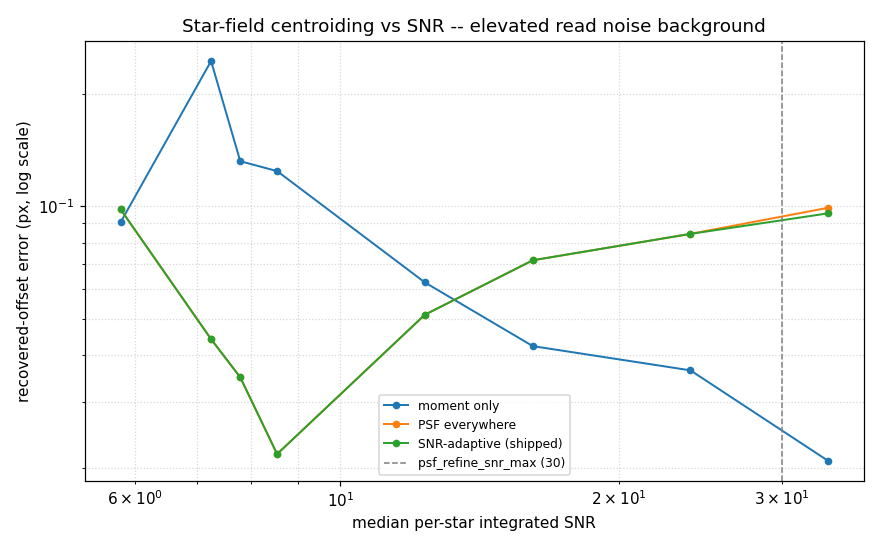
Elevated read noise (read_noise_dn 20). The crossover sits near an integrated SNR of ~16.
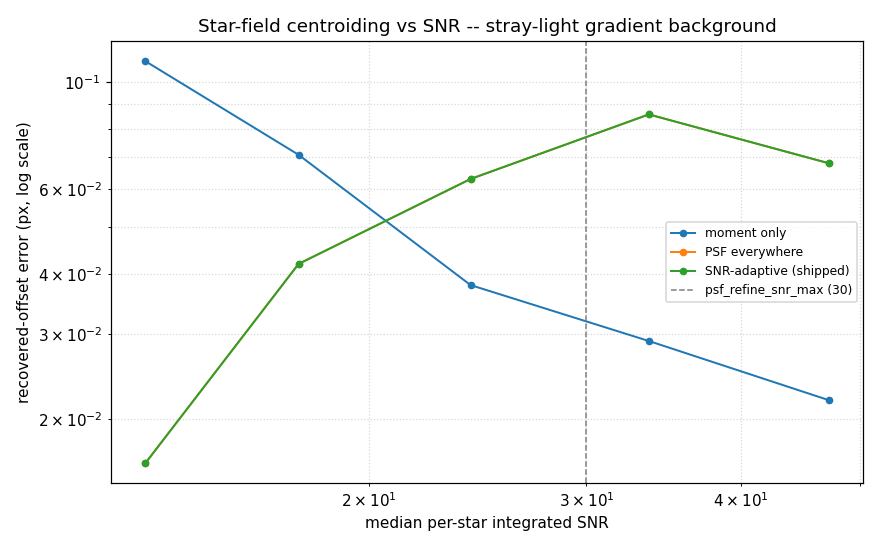
Stray-light linear gradient. The crossover sits near an integrated SNR of ~21; the gradient barely shifts the curves.
The moment/PSF crossover sits near an integrated SNR of ~30 on a clean background, ~16 under heavy read noise, and ~21 under a stray-light gradient. The estimator selection and its tuning are documented in Star Field Pattern Match (StarFieldFromCatalogNav).
Per-technique accuracy across SNR and injected offset
Each technique’s accuracy versus signal-to-noise and versus the injected offset
is characterized by python -m tests.integration.technique_snr_characterization
(runner-only). Two figure families come out of it; offsets and noise levels are
stated on each panel.
Accuracy versus SNR (fixed injected offset). Each technique’s base scene is
rendered at a fixed off-grid (dv, du) = (+0.317, -0.211) px offset. The
per-image read noise is swept from a clean frame down toward the navigability
cliff; the x-axis is a uniform per-image SNR proxy
(peak - background) / robust_noise. Each technique’s feature has a different
intrinsic brightness, so the curves occupy different SNR bands.
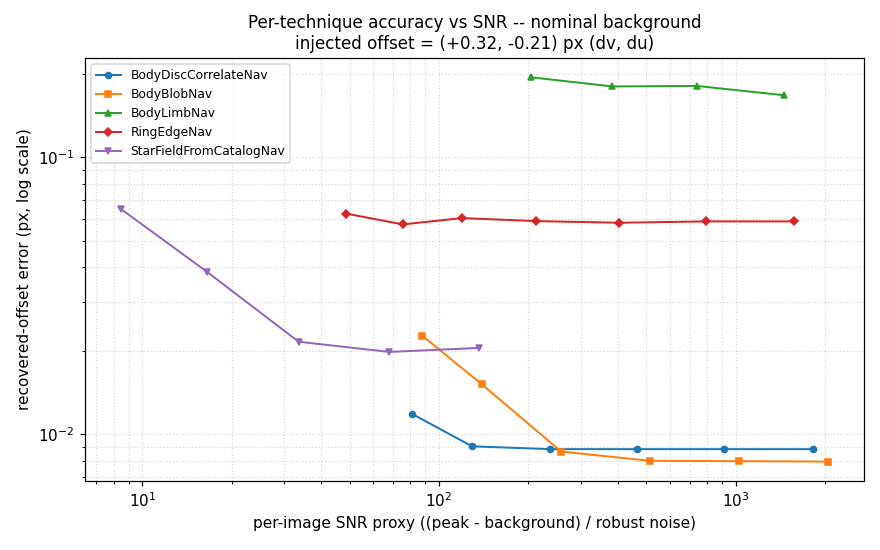
Nominal background. The disc (~0.01 px) and blob (~0.008 px) are the most accurate and both flat with SNR. The star improves steadily with SNR. The ring is flat at ~0.06 px and the limb at ~0.15 px, both distance-transform residuals independent of SNR.
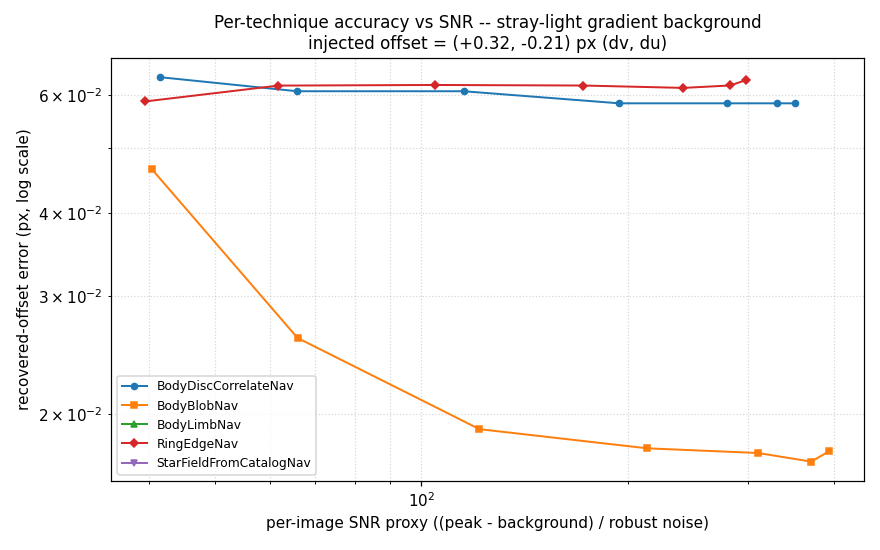
A gentle stray-light gradient (linear ramp ~3% of full scale). The blob stays most accurate (~0.016 px), the disc rises to ~0.04 px, the ring holds ~0.06 px; the limb and star field return no result (their curves are absent). Stray light is a larger threat to the faint-feature techniques than read noise alone.
The disc and ring sub-pixel residuals are off-grid effects (zero at integer and half-pixel offsets), measured here against an off-grid planted offset. Their mechanisms are documented in Body Disc Correlate (BodyDiscCorrelateNav) and Ring Edge Fit (RingEdgeNav).
Accuracy versus injected offset (fixed SNR). Holding the read noise at three levels, a
pure-vertical offset is swept from 0 to 1.75 px (u held at 0) for every technique. The
panels share a y-range so the degradation as SNR drops reads directly.
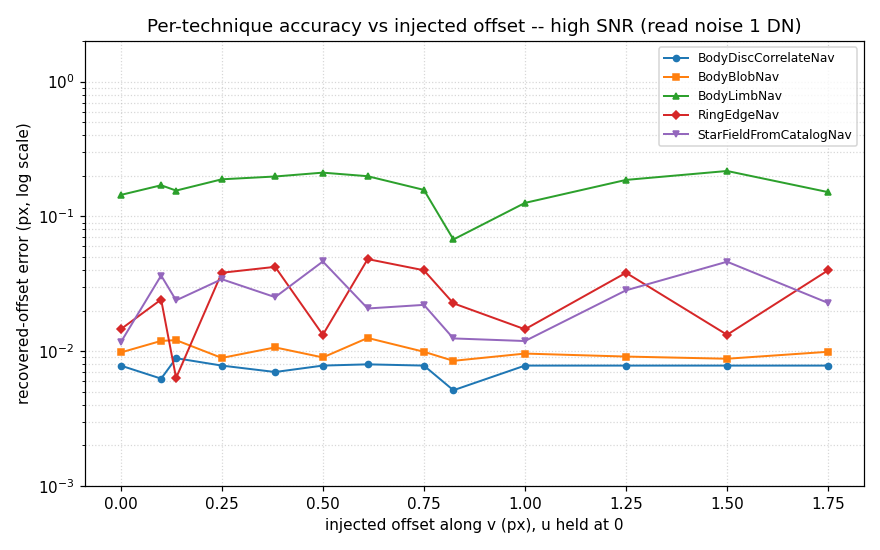
High SNR (read noise 1 DN). Every technique recovers to a few hundredths of a pixel with no dependence on the fractional part (the disc drops below 0.001 px at several offsets); only the limb’s bias floor stands out. This panel matches the dense fractional sweep.
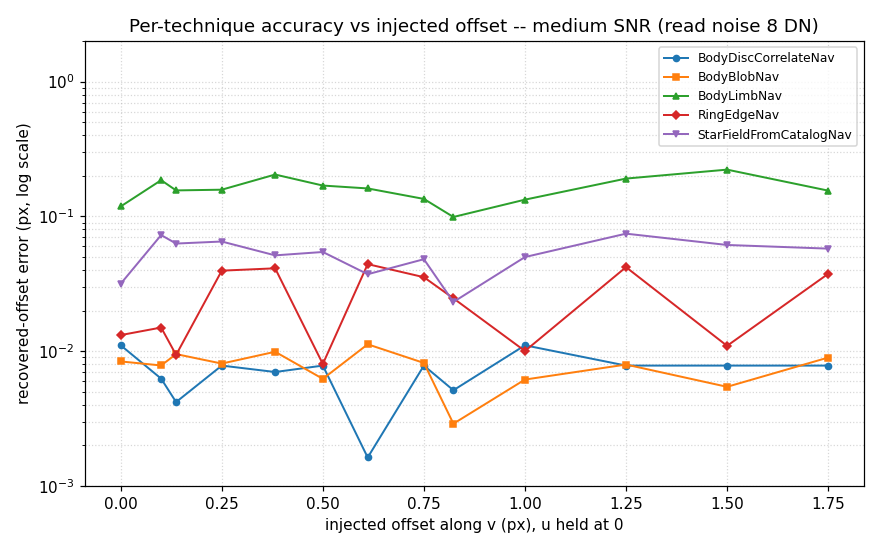
Medium SNR (read noise 8 DN). The star field degrades to ~0.05-0.07 px and the others hold; the limb stays at its bias floor.
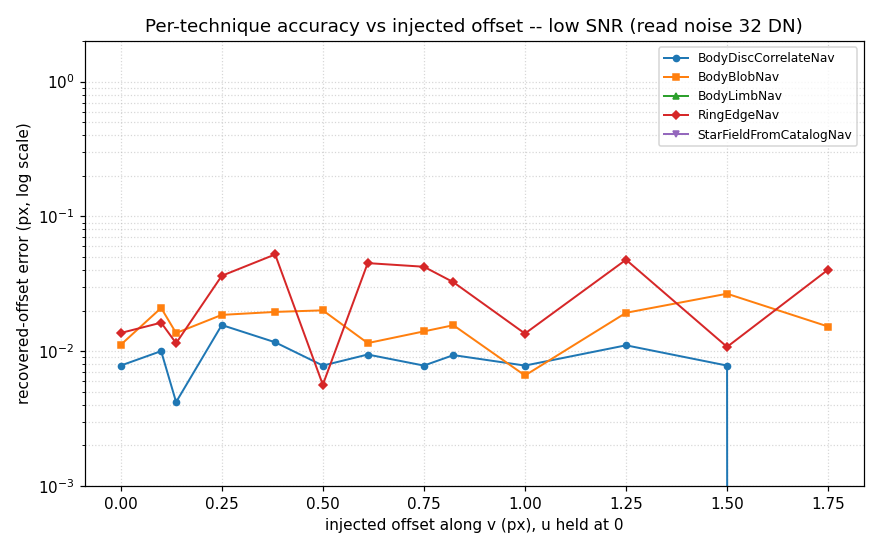
Low SNR (read noise 32 DN). The disc, blob, and ring still recover (their features are bright), but the limb and star field have crossed their navigability cliff and return no result at any offset – the missing curves are the failure, not an omission.
Irregular-body navigation
Non-ellipsoidal bodies (Hyperion-like, Phoebe-like) are rendered from a
procedurally generated polyhedral mesh at a chosen three-axis pose. By default the
navigator predicts the body from the same mesh and pose the renderer drew, so the
recovery is exact by construction; the cases below also drive the navigator with a
deliberately wrong shape or pose through the nav_override channel
(The Image Simulator), which is what makes a chaotic rotator’s
genuinely unknown orientation testable.
Scene |
Technique (geometry) |
Planted |
Recovered |
Error |
|---|---|---|---|---|
|
BodyDiscCorrelateNav (mesh = mesh) |
(1.43, -0.61) px |
(1.43, -0.61) px |
0.00 px |
|
BodyLimbNav (mesh = mesh) |
(1.43, -0.61) px |
(1.26, -0.53) px |
0.19 px |
|
BodyBlobNav (mesh, 120 deg) |
(1.43, -0.61) px |
(1.24, -0.52) px |
0.21 px |
|
full ensemble (predict ellipsoid) |
(1.43, -0.61) px |
(1.99, -0.90) px |
0.63 px |
When the predicted geometry matches the rendered mesh, the mesh disc, mesh limb, and mesh crescent recover the planted offset as tightly as their ellipsoid counterparts (0.00-0.21 px). The fourth row is the shape-mismatch case: the frame renders a mildly irregular mesh but the navigator predicts its smooth (ellipsoidal) limit at the same pose, and the body still navigates – the disc correlation aligns the two filled silhouettes and recovers to within two-thirds of a pixel.
Shape mismatch vs irregularity
Holding the navigator’s prediction at the smooth (zero-relief) limit and walking
the rendered mesh’s surface relief up isolates the centroid bias an ellipsoidal
model cannot remove – the regime the navigator’s phase_irregularity_factor
term is meant to capture.
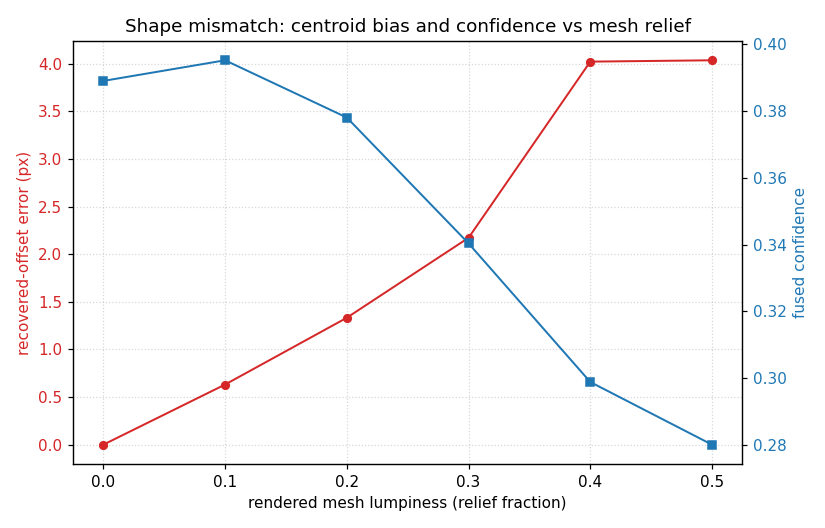
Recovered-offset error (red) and fused confidence (blue) vs rendered mesh lumpiness, with the prediction pinned to the zero-relief limit. The bias grows from ~0.00 px (no mismatch) to ~4 px at heavy relief while the confidence falls from ~0.39 to ~0.28 – the navigator both mis-locates the body and reports lower confidence as the shape diverges.
The recovered error grows monotonically with relief (0.00, 0.63, 1.33, 2.17,
4.02, 4.03 px at lumpiness 0.0 through 0.5) and the fused confidence falls in step
(0.39 down to 0.28). The body keeps navigating to a success status throughout
– the disc correlation still locks onto the silhouette – but the answer drifts,
which is exactly the failure an irregular-body confidence penalty must learn to
distrust.
Pose disagreement
For a body whose orientation we cannot trust, the useful question is what happens when the assumed pose is wrong. Rendering the mesh at its true pose and walking the navigator’s predicted pose away from it degrades the orientation-dependent limb fit:
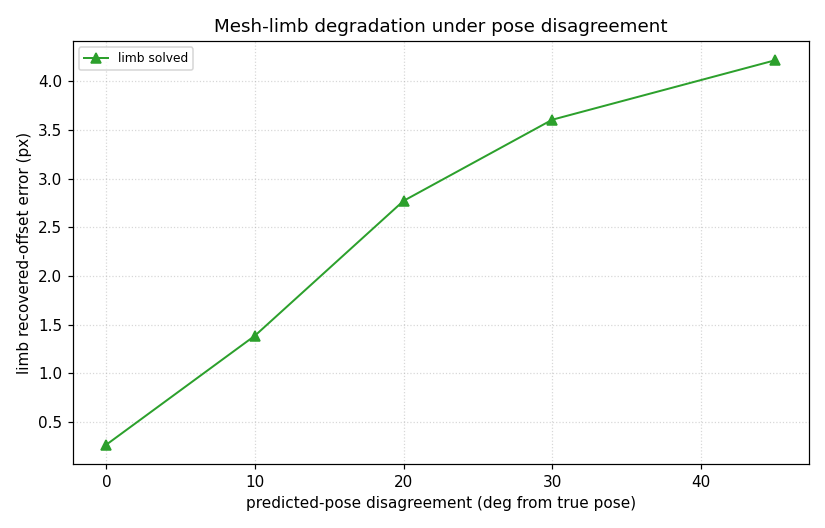
Pinned-limb recovered-offset error vs the predicted pose’s disagreement with the true (rendered) pose (a tumble about the body’s long axis). The limb keeps returning a fix across the swept range, but its error climbs from 0.27 px at the true pose to 4.2 px at a 45 deg disagreement – a confidently-wrong limb that does not self-flag here.
The limb error climbs monotonically from 0.27 px at the true pose to 4.2 px at a
45 deg tumble, all the while still reporting success at ~0.66 confidence: it
does not self-flag in this range. A wrong in-plane roll degrades it far more
sharply – tens of pixels, and there it does self-flag spurious. The pose-free
blob centroid, by contrast, stays accurate on the same wrong-pose body, because a
centrally-symmetric (low-relief triaxial) body’s lit-weighted centroid barely
moves under rotation. This is the behaviour the test_sim_irregular_pose
per-technique test pins: on a wrong-pose body the
system should demote from the confidently-wrong limb to the orientation-free
blob.
Camera-roll sensitivity and roll / translation separability
Sweeping the planted camera roll on a star field shows both the working window and the separability floor:
Planted roll |
Full-ensemble error |
StarFieldFromCatalogNav alone |
|---|---|---|
0.25 deg |
– |
collapses to 0 (spurious) |
0.5 deg |
0.05 deg |
collapses to 0 (spurious) |
0.75 deg |
– |
0.69 deg (partial) |
1.0 deg |
0.01 deg |
1.04 deg |
1.5 deg |
0.01 deg |
1.51 deg |
2.0 deg |
0.12 deg |
1.89 deg |
A small roll is not separable from a translation. StarFieldFromCatalogNav’s
RANSAC pattern matcher returns a zero roll (and a spurious flag) below ~0.75 deg.
The two-star StarUniqueMatchNav path recovers down to ~0.5 deg, so the full
ensemble recovers the 0.5 deg roll even where the field matcher alone does not.
At exactly zero roll no technique reports a rotation. Above ~2-3 deg the inlier
count falls below quorum. The usable window for the field matcher is therefore
roughly 0.75-2 deg, widening to ~0.5 deg with the two-star path. See
Star Field Pattern Match (StarFieldFromCatalogNav) and
Star Unique Match (StarUniqueMatchNav).
Summary
All seven feature techniques (disc, mesh disc, blob, high-phase blob, star field, limb, ring edge) plus the camera-roll fit recover their planted transform to sub-pixel / sub-half-degree accuracy on clean simulated frames.
The disc, blob, ring edge, and star field are quantization-free: they recover any offset – whole, near-boundary, or arbitrary fraction – to a few hundredths of a pixel. The disc and blob are the most accurate (~0.01 px). The limb holds a ~0.13 px distance-transform residual and the ring a ~0.06 px residual.
The star field improves with SNR: a dim field recovers to ~0.02 px and a bright field to ~0.005 px, the most accurate of any technique.
Irregular (mesh) bodies navigate as accurately as ellipsoids when the predicted geometry matches the rendered one (mesh disc, limb, and crescent all recover to 0.00-0.21 px). When the navigator predicts the wrong shape the centroid bias grows with the rendered relief (to ~4 px) and the confidence falls; when it predicts the wrong pose the limb degrades to a confidently-wrong fix (or, for a wrong in-plane roll, far enough that it self-flags) while the pose-free blob holds – the demote-to-pose-free behaviour a chaotic rotator needs.
The sweeps show the expected qualitative behaviour: navigation degrades to a clean failure past the noise cliff, the resolved body recovers across the full phase range with no mid-phase accuracy penalty, and the primary technique walks the limb -> disc -> blob ladder as a body shrinks.
A small camera roll is not separable from a translation: the field matcher recovers rolls only above ~0.75 deg (the two-star fit extends this to ~0.5 deg), and the small-body navigation floor (~16-24 px) is set by the feature-reliability gate, not the centroid algorithm. Navigation is unit-agnostic: I/F frames navigate identically to raw DN.
The confidence column is flat across the navigable range on these uncalibrated clean frames; the report verifies the recovered geometry and the technique selection.